CelestialBody¶
-
class CelestialBody¶
Represents a celestial body (such as a planet or moon). See
bodies().-
std::string name()¶
The name of the body.
-
std::vector<CelestialBody> satellites()¶
A list of celestial bodies that are in orbit around this celestial body.
-
double mass()¶
The mass of the body, in kilograms.
-
double gravitational_parameter()¶
The standard gravitational parameter of the body in \(m^3s^{-2}\).
-
double surface_gravity()¶
The acceleration due to gravity at sea level (mean altitude) on the body, in \(m/s^2\).
-
double rotational_period()¶
The sidereal rotational period of the body, in seconds.
-
double rotational_speed()¶
The rotational speed of the body, in radians per second.
-
double rotation_angle()¶
The current rotation angle of the body, in radians. A value between 0 and \(2\pi\)
-
double initial_rotation()¶
The initial rotation angle of the body (at UT 0), in radians. A value between 0 and \(2\pi\)
-
double equatorial_radius()¶
The equatorial radius of the body, in meters.
-
double surface_height(double latitude, double longitude)¶
The height of the surface relative to mean sea level, in meters, at the given position. When over water this is equal to 0.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
-
double bedrock_height(double latitude, double longitude)¶
The height of the surface relative to mean sea level, in meters, at the given position. When over water, this is the height of the sea-bed and is therefore negative value.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
-
std::tuple<double, double, double> msl_position(double latitude, double longitude, ReferenceFrame reference_frame)¶
The position at mean sea level at the given latitude and longitude, in the given reference frame.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
reference_frame – Reference frame for the returned position vector.
- Returns:
Position as a vector.
-
std::tuple<double, double, double> surface_position(double latitude, double longitude, ReferenceFrame reference_frame)¶
The position of the surface at the given latitude and longitude, in the given reference frame. When over water, this is the position of the surface of the water.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
reference_frame – Reference frame for the returned position vector.
- Returns:
Position as a vector.
-
std::tuple<double, double, double> bedrock_position(double latitude, double longitude, ReferenceFrame reference_frame)¶
The position of the surface at the given latitude and longitude, in the given reference frame. When over water, this is the position at the bottom of the sea-bed.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
reference_frame – Reference frame for the returned position vector.
- Returns:
Position as a vector.
-
std::tuple<double, double, double> position_at_altitude(double latitude, double longitude, double altitude, ReferenceFrame reference_frame)¶
The position at the given latitude, longitude and altitude, in the given reference frame.
- Parameters:
latitude – Latitude in degrees.
longitude – Longitude in degrees.
altitude – Altitude in meters above sea level.
reference_frame – Reference frame for the returned position vector.
- Returns:
Position as a vector.
-
double altitude_at_position(std::tuple<double, double, double> position, ReferenceFrame reference_frame)¶
The altitude, in meters, of the given position in the given reference frame.
- Parameters:
position – Position as a vector.
reference_frame – Reference frame for the position vector.
-
double latitude_at_position(std::tuple<double, double, double> position, ReferenceFrame reference_frame)¶
The latitude of the given position, in the given reference frame.
- Parameters:
position – Position as a vector.
reference_frame – Reference frame for the position vector.
-
double longitude_at_position(std::tuple<double, double, double> position, ReferenceFrame reference_frame)¶
The longitude of the given position, in the given reference frame.
- Parameters:
position – Position as a vector.
reference_frame – Reference frame for the position vector.
-
double sphere_of_influence()¶
The radius of the sphere of influence of the body, in meters.
-
bool is_star()¶
Whether or not the body is a star.
-
bool has_solid_surface()¶
Whether or not the body has a solid surface.
-
bool has_atmosphere()¶
trueif the body has an atmosphere.
-
double atmosphere_depth()¶
The depth of the atmosphere, in meters.
-
double atmospheric_density_at_position(std::tuple<double, double, double> position, ReferenceFrame reference_frame)¶
The atmospheric density at the given position, in \(kg/m^3\), in the given reference frame.
- Parameters:
position – The position vector at which to measure the density.
reference_frame – Reference frame that the position vector is in.
-
bool has_atmospheric_oxygen()¶
trueif there is oxygen in the atmosphere, required for air-breathing engines.
-
double temperature_at(std::tuple<double, double, double> position, ReferenceFrame reference_frame)¶
The temperature on the body at the given position, in the given reference frame.
- Parameters:
position – Position as a vector.
reference_frame – The reference frame that the position is in.
Note
This calculation is performed using the bodies current position, which means that the value could be wrong if you want to know the temperature in the far future.
-
double density_at(double altitude)¶
Gets the air density, in \(kg/m^3\), for the specified altitude above sea level, in meters.
- Parameters:
Note
This is an approximation, because actual calculations, taking sun exposure into account to compute air temperature, require us to know the exact point on the body where the density is to be computed (knowing the altitude is not enough). However, the difference is small for high altitudes, so it makes very little difference for trajectory prediction.
-
double pressure_at(double altitude)¶
Gets the air pressure, in Pascals, for the specified altitude above sea level, in meters.
- Parameters:
-
std::set<std::string> biomes()¶
The biomes present on this body.
-
std::string biome_at(double latitude, double longitude)¶
The biome at the given latitude and longitude, in degrees.
- Parameters:
-
float flying_high_altitude_threshold()¶
The altitude, in meters, above which a vessel is considered to be flying “high” when doing science.
-
float space_high_altitude_threshold()¶
The altitude, in meters, above which a vessel is considered to be in “high” space when doing science.
-
ReferenceFrame reference_frame()¶
The reference frame that is fixed relative to the celestial body.
The origin is at the center of the body.
The axes rotate with the body.
The x-axis points from the center of the body towards the intersection of the prime meridian and equator (the position at 0° longitude, 0° latitude).
The y-axis points from the center of the body towards the north pole.
The z-axis points from the center of the body towards the equator at 90°E longitude.
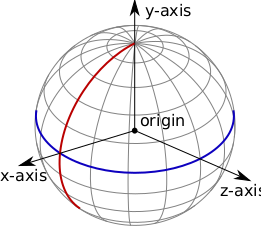
Celestial body reference frame origin and axes. The equator is shown in blue, and the prime meridian in red.¶
-
ReferenceFrame non_rotating_reference_frame()¶
The reference frame that is fixed relative to this celestial body, and orientated in a fixed direction (it does not rotate with the body).
The origin is at the center of the body.
The axes do not rotate.
The x-axis points in an arbitrary direction through the equator.
The y-axis points from the center of the body towards the north pole.
The z-axis points in an arbitrary direction through the equator.
-
ReferenceFrame orbital_reference_frame()¶
The reference frame that is fixed relative to this celestial body, but orientated with the body’s orbital prograde/normal/radial directions.
The origin is at the center of the body.
The axes rotate with the orbital prograde/normal/radial directions.
The x-axis points in the orbital anti-radial direction.
The y-axis points in the orbital prograde direction.
The z-axis points in the orbital normal direction.
-
std::tuple<double, double, double> position(ReferenceFrame reference_frame)¶
The position of the center of the body, in the specified reference frame.
- Parameters:
reference_frame – The reference frame that the returned position vector is in.
- Returns:
The position as a vector.
-
std::tuple<double, double, double> velocity(ReferenceFrame reference_frame)¶
The linear velocity of the body, in the specified reference frame.
- Parameters:
reference_frame – The reference frame that the returned velocity vector is in.
- Returns:
The velocity as a vector. The vector points in the direction of travel, and its magnitude is the speed of the body in meters per second.
-
std::tuple<double, double, double, double> rotation(ReferenceFrame reference_frame)¶
The rotation of the body, in the specified reference frame.
- Parameters:
reference_frame – The reference frame that the returned rotation is in.
- Returns:
The rotation as a quaternion of the form \((x, y, z, w)\).
-
std::tuple<double, double, double> direction(ReferenceFrame reference_frame)¶
The direction in which the north pole of the celestial body is pointing, in the specified reference frame.
- Parameters:
reference_frame – The reference frame that the returned direction is in.
- Returns:
The direction as a unit vector.
-
std::tuple<double, double, double> angular_velocity(ReferenceFrame reference_frame)¶
The angular velocity of the body in the specified reference frame.
- Parameters:
reference_frame – The reference frame the returned angular velocity is in.
- Returns:
The angular velocity as a vector. The magnitude of the vector is the rotational speed of the body, in radians per second. The direction of the vector indicates the axis of rotation, using the right-hand rule.
-
std::string name()¶